

Could-to-Cloud alignment algorithms and result values vary with every software. Although there is no certainty if two scans reached optimum cloud alignment (within the accuracy limit of the data), there are common ways for checking and interpreting the accuracy of the results.
RMS Error (or Mean Error)
As a rule, the alignment error or RMS error should equal or be greater than the accuracy of the scanner used to scan.
Since the accuracy of the captured data is relative to the distance from the scanner, the RMS errors for exterior scans will be greater than that for interior scans.
An RMS value of 3 to 6mm should be the minimum, if working with modern scanners. Since the overlap measurements are often imprecise, the alignment RMS is generally above 6mm depending on the geometry of the environment. For registrations of interior spaces, if the RMS errors are below 10mm, the alignments are likely good. For exterior scans or scans of large interior spaces, an RMS error that is below 15mm should indicate good alignment.
In general, if the environment contains a lot of smooth surfaces and the alignment between two clouds is very good, then the RMS error is 6mm or even lower. However, for scans that contain complex geometry with rough surfaces, such as vegetation, the RMS error will be higher since the overlapping points may not always occupy the same location.
Overlapping
The consensus is to ensure 60% overlap between constrained scans. The challenge with this recommendation is that we cannot measure the overlap between two scans while we are in the field, so we tend to over scan. Then, once the scans are registered, the software reports an overlapping number of points for each constraint, which is difficult to interpret. How many points should overlap for a given constraint?
Based on our preferred cloud registration sub-sampling of 75% we observed the following numbers of overlapping points to be appropriate for a good alignment: interior scans (with simple geometry) – between 15,000 points and 500,000 points; exterior scans (with complex geometry) – between 100,000 points and 1,500,000 points. These ranges help us quickly identify possible false positive results when checking the constraint list.
If we look at the registration shown below, we can see that the RMS and global errors are indicating a good registration. However, one of the constraints has an unusual low number of overlap points compared to the rest and it’s outside the average range. When we visually examined the constraint, we determined the scans’ alignment was off by almost 4 meters.
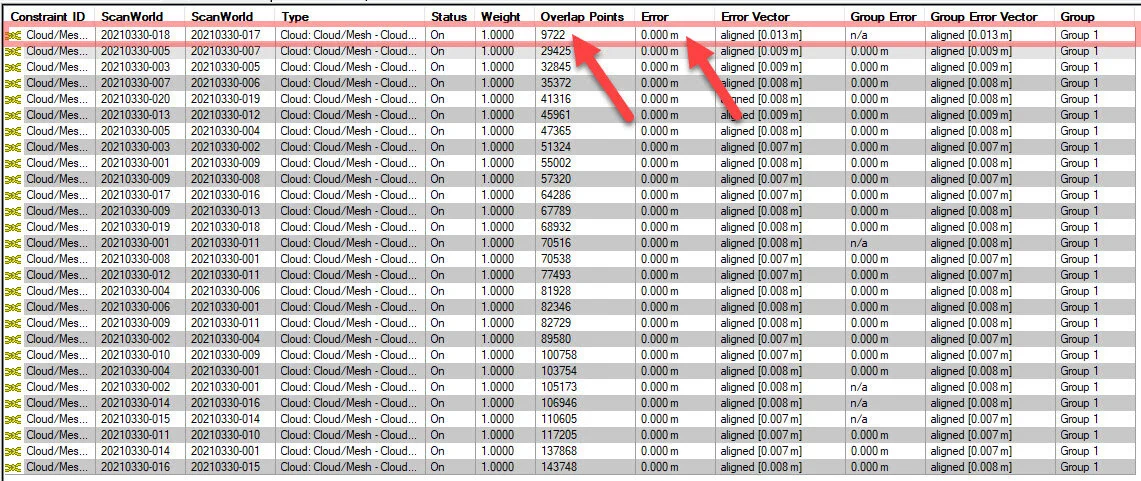
Identity and fix registration issues using Overlap Points

Scans misaligned by almost 4 meters
As we can see checking the overlapping points can help you find and fix registration issues.
Error Histogram (if available)
The error histogram is another tool what will give you an indication if you have a good alignment between two scans.
The histogram normally begins as a horizontal line, and then gradually tightens up to the shape of a vertical half-bell curve. The half-bell curve shape indicates that the alignment has been optimized properly. The width of the half-bell curve should approximately match the accuracy of the scanner used to capture the cloud. A histogram that remains flat indicates that the initial guess was too far away for the Cloud Alignment algorithm to align the clouds.
Below are a few examples of histograms observed during the optimization process.
Note that the histograms for interior scans will look different than the ones for exterior scans, as it reflects the RMS error discussed above. See examples below.

Histogram example - Interior Scans Alignment

Histogram example - Exterior Scans Alignment
Visual Check
The tools and the alignment results are great for performing an initial check of the registration or to catch mistakes while adding constraints to a registration. However, none of those checking methods could replace the visual check. No registration should be finalized without thoroughly inspecting the alignment of all the scans. This final check can be easily achieved by sectioning the interim registration on all three axes.
If you have other suggestions for how to interpret cloud alignments, please leave a comment below. We would love to find new ways for improving the process and providing better products to our community.